




History tour
Soviet expeditions to the moon in the early seventies of the last century vividly confirmed the expediency of studying its surface by mobile scientific laboratories. We are talking about the "Lunokhod-1" and "Lunokhod-2", delivered to the natural satellite of the Earth by Soviet lunar spacecraft (LKA) "Luna-17" and "Luna-21" on November 17, 1970 and January 16, 1973, respectively.
One of the initiators of space exploration by interplanetary stations, the probing of the Moon and the planets of the Solar System was the head of the Institute of Applied Mathematics of the USSR Academy of Sciences, President of the Academy of Sciences Mstislav Vsevolodovich Keldysh. The very idea of exploring an artificial satellite of the Earth by manned spacecraft (KK), launching a person to it and creating a space automatic self-propelled device with a complex of scientific instruments with communication and observation equipment belongs to the chief designer of the OKB-1 Sergey Pavlovich Korolev.
The launch of the lunar program was preceded by the resolution of the Central Committee of the CPSU and the USSR Council of March 20, 1958 “On launches of space objects in the direction of the Moon”, which was called the Program “E”. Shortly after its publication in OKB-1, it was launched. One of the points of this large-scale project was the development and design of a vehicle remotely controlled from Earth for astronauts. It was assumed that before a manned flight, two such vehicles would be sent to selected primary and reserve landing areas. They were intended for detailed surveys in order to select the optimal landing site and would also be radio beacons at reduced QC, and then (if necessary) and a means of delivering the cosmonaut to the reserve ship.
In July 1963, Korolyov proposed the director of the Leningrad All-Russian Scientific Research Institute-100 V.S. Starovoytovu develop the appropriate chassis. He agreed, and work on the topic “Determining the Opportunity and Choosing the Direction in Creating the Self-Propelled Chassis of the L-2 Machine” began under the scientific guidance of the head of the new movement principles department A.L. Kemurdzhiana.
The project of the eight-wheeled chassis in the option of increased reliability was justified by the VNII-100 staff for the first time. In mid-1965 S.P. Korolev handed over work on the creation of interplanetary stations for the study of the planets of the Solar System and the Moon to the team of the Khimki Machine-Building Plant named after S.А. Lavochkin, who was determined by the head company of unmanned cosmic devices. In passing, I would note that the scientific and technical potential of both enterprises made it possible in the shortest possible time to successfully continue the lunar program begun in the OKB-1.
The first steps of the unmanned lunar program
In November 1965, an agreement was signed between enterprises in which specific tasks were defined: the team from Khimki was responsible for creating and delivering a mobile scientific laboratory to the Moon, and VNII-100 for creating a self-propelled chassis with an automatic control unit and its security system with a set of information sensors. As a result of the combined efforts, a spacecraft was to be born in the form of a remotely controlled vehicle of high manoeuvrability with scientific equipment placed on it. And the name it, like the first Soviet satellite, received no less significant - the lunar rover.
The remote control of them was a fundamentally new problem, which until that time had not yet been solved by either the domestic cosmonautics or foreign astronautics. In early April 1968 G.N. Babakin came up with a proposal to Major-General I.I., head of the Command and Measuring Complex Centre (KMC). Spitz on the formation of operators for control from the Earth unusual space transport. And it received approval, and in May a telephone message arrived at the Scientific Measuring Points (NIP), in which it was proposed to send officers to Moscow willing to devote themselves to testing work on space exploration.
At the end of May 1968, more than 40 officers arrived at the Institute for Biomedical Problems (IMBP) for a medical examination. Qualified medical specialists during the month meticulously evaluated their overall physical condition, vision and hearing, endurance, excitability, long-term and operational memory, ability to navigate in space, ability to switch attention and many other indicators.
On July 11, the Deputy Head of the CEC Centre for Science and Measurements, Major General P.A. Agadzhanova meeting was held, which was attended by Deputy G.N. Babakina on the lunar theme OG Ivanovsky, Head of the Scientific Coordination and Computing Part, Colonel A. Bolshoi, Head of the Department 25 of the same structure, Colonel A. P. Romanov, head of the IMBP department, colonel of the medical service Yu.A. Petrov and others
Romanov introduced the 18 officers who passed all the tests, and offered to include them in the special group. In turn, Agadzhanov explained its purpose: from the Simferopol Centre for Distant Space Communication (CDKS) to learn the remote control of a self-propelled mobile scientific laboratory on the Moon. At the same time, Ivanovsky paid special attention to the fact that the profession of such an operator is fundamentally new and requires an understanding of the tasks set before the participants of great state importance.
After the individual interview in the group there were 14 people left: Yu.F. Vasiliev, K.K. Davidovsky, V.G. Dovgan, N.M. Eremenko, N.N. Ivanov, A.I. Kalinichenko, A.E. Kozhevnikov, N.Ya. Kozlitin, G.G. Latypov, L.Ya. Mosenzov, V.M. Sapranov, V.G. Samal, I.L. Fedorov and V.I. Chubukin.

Vyacheslav Georgievich Dovgan
Three days later we were presented to Babakin. I remember his words of part in his memory: “I want to warn you: the technique with which you are to work is not something new, but new. It will be created before your eyes, and you will become active participants in this process. As test pilots in the aviation design bureau ... But there is experience, continuity, traditions, and we are starting from scratch, for the first time ... I will not hide: it will be difficult for everyone. Both us and you. And we will have the same responsibility. As they say, "bruises and bumps" are common ... But you will become pioneers, and this happiness does not happen to everyone in life. The sooner you start getting into the picture, the better it will be for you. You need to know the whole car. It will be of little use if you study only the buttons, which one to press, when to go forward, and which one, when to go back. Behind each button you should see the whole scheme and logic of its work. ”
At this meeting, it was decided to create three training groups. One of them was attached to the OKB-301, where tests of the onboard systems of the moon research vehicle were in full swing, the other (drivers of the future moon research vehicle) went down at VNII-100, the third (future navigators) went to the Space Research Institute (IKI) of the USSR Academy of Sciences. Practical classes were held directly in the workshops and laboratories, where tests and experiments were carried out with technological samples of the chassis of the moon rover.
In the company MS Ryazan (NII-885. - Note by the author.) Experienced experts organised and conducted for us a course of lectures and practical classes on the radio engineering systems of the moon research vehicle and the ground-based means of its control.
Particular attention was paid to the study of the remote control system of the moon research vehicle. The choice of its rational structure was not easy, since it was "locked in" on a person with his psyche, his characteristic reaction, ability to analyse and other features that characterise a thinking person.
Thus, as a result of our studies, we got acquainted with technical documentation, design features of the lunar rover systems, schematic diagrams, remote control logic, as well as modern ideas about our natural satellite, the Moon.
Features of the moon rover control from the ground
It is known that the propagation of radio waves from the Earth to the Moon, as well as the transmission of television images from the surface of the latter, in general, take almost 2.6 seconds. If we add on to this the time for analysing the situations that arise, assessing the “road” situation and for the command to be executed by the governing bodies, then the delay for making decisions will be on average at least four seconds. It is one thing when the vehicle is controlled by an operator directly on it, and another when it is located at a distance of 384 thousand kilometres from the object. The transmission of a television image (25 frames per second at a clarity of 625 lines) could only be carried out via a high-speed radio link between the moon rover and the PUL. However, there was no such technical possibility in those years.
Then the chief designer of NII-885 MS Ryazan proposed to use a low-frame television system for controlling the motion of the moon rover. And he was right. This made it possible to transmit 1 image frame to Earth at lower speeds in one of the four modes: 3.2; 5.76; 10.88 and 21.12 seconds. Mode selection was carried out by radio commands from Earth. At the same time, the black-and-white image on the monitors of terrestrial devices was similar to the filmstrip footage that replaced each other and was not of the highest quality (the clarity dropped to 350-400 lines, and at the edges of the field up to 300 lines). In the upper corner of each image, its number and time of receipt were recorded. Not fiction, of course, but it certainly was a step forward under the conditions that existed then.
A month later, the groups gathered in Khimki, where they continued their joint studies on the approved O.G. Ivanovo program. She took into account a number of specific features of the moon research vehicle control from the ground. I will explain. They consisted in the lack of direct perception by the operator of the movement itself and the difficulty in perceiving the terrain on the television screen, in time delays when issuing aboard radio commands, receiving from the television image and telemetry information, the dependence of the mobility characteristics of the self-propelled vehicle on the terrain conditions and soil properties. This circumstance required, first of all, the driver to have certain skills and psychophysical properties.
These included the ability to operate with spatial representations in isolation from the controlled vehicle and the ability to evaluate the situation with advance time to compensate for time delays in the control system. The driver should have a good memory, the ability for long-term attention, the ability to quickly assess the situation using a television image, determine the distance to obstacles and their dimensions. He was required to respond quickly and analyse information, select a rational further route of movement and make a decision on the method and method of controlling the moon rover.
Creation of educational base and control point
Soon there was a need for practical training of crews in the skills of remote control of the vehicle and the creation of a management structure. Plus it was necessary to have at least one technical sample of the moon research vehicle.
And the work began to boil. July 12, 1968 G.N. Babakin approved a master plan for a special structure - a lunar-drome. In late August, under the leadership of Colonel N.I. Bugaev on the technical territory of the Simferopol TsDKS a Lunokhod Control Point (PUL) was built, and in September the lunar-drome was also ready. Its area was approximately one hectare. According to the selenologists, he then represented a very accurate copy of some parts of the lunar surface transferred to the ground.
By this time, Soviet scientists already had a model of a natural satellite of our planet, well represented the properties of the lunar soil and knew its density. It should be especially emphasised that the creation of the “lunar landscape” proceeded under the guidance of the well-known geochemist Academician A.P. Vinogradov.
The PUL was intended for command-and-program control of lunar spacecraft in real time, taking into account the received telemetric, television, photometric, scientific and other information. With the participation of the crew, technical specifications for the equipment were developed, the mathematical software for the automated telemetry information processing complex (ACOTI) with the display equipment and automated processing on the STI-90M equipment was debugged.
In early September 1968, one of the technological samples of the Lunokhod, which had an index of 108A, was delivered to the lunar-drome. This is a full-scale model of a lunar rover on the chassis, but without a solar panel, with television systems, with an introduced delay corresponding to the propagation time of radio waves from Earth to the Moon and back. True, the connection with him was carried out not by radio, as it should be in real conditions, but by a 16-wire cable. Its length is about 110 m, and its mass is more than 100 kilograms. Somewhat later, our group of fourteen officers arrived at the NPC-10.
For the development of the program and methods of training the operators for the management of the Lunokhod, a group was created under the direction of PS. Sologub. It includes V.V. Babenko, F.I. Babich, Yu.I. Vasilyev, V.V. Gromov, O.A. Zinkevich, Yu.P. Kitlyash, V.A. Korovkina, A.I. Krasnov, B.M. Lubenko, B.V. Nepoklonov, V.N. Petriga, L.N. Polyakov, O.A. Senkov, Yu.A. Khakhanov, L.T. Cherepanova and F.P. Shpak. Plus, the staff of the Institute of Biomedical Problems of the Ministry of Health of the USSR: Candidate of Medical Sciences Colonel of the Medical Service P.Ya. Nurdygin, I.V. Kholzunova, N.A. Nefedchenko et al. Soon, the submissions were coordinated with OG Ivanovsky and approved G.N. Babakin.
What was the composition of the crews
The peculiarities of the moon research vehicle motion control led, essentially, both to the formation of a new class of problems in the theory of vehicle control, and to the emergence of the specialty “Moon research vehicle driver” that did not exist earlier on Earth. He is the most important, but not the only element of the contour. Both theory and practice have shown that simply driving one driver is not enough to control the moon research vehicle. A large amount of received information, the need for its quick processing (especially in extreme, abnormal situations) required the presence of operators and other specialists.
The moon research vehicle is a multifunctional integrated apparatus, rich in electronic devices and mechanisms, and the monitoring of the state of all its onboard service systems is not a simple matter. Obtaining such information was carried out via telemetry channels and recorded on 32 recording racks. Each of them was served by a telemetry-decoder, included in the duty calculation of PUL. Among the hundreds of measured parameters there are dozens of such, without knowing which control of the moon rover is simply impossible. Evaluation of the state of all systems of the moon research vehicle in real time was assigned to the flight engineer. Laying the distance traveled along the entire route of the moon research vehicle’s movement — a task first posed in world space practice, was solved, first of all, by studying the photo-telescopes of the lunar surface. The shadows were used to determine the position of the Sun above the horizon, and most importantly, obstacles in the form of stones, craters, cracks, etc., that were not previously seen on a TV screen, were detected.
Carefully analysed information from the on-board course gyro, vertical alignment and distance sensors. In the course of the traffic session, according to the reports of the driver and the flight engineer, the decision was made to choose a further course of the moon research vehicle’s motion. This difficult and continuous process of reckoning the path, laying the route of movement in a given direction was assigned to another operator - the navigator.
Simulation of the moon research vehicle displacement process showed that cases cannot be ruled out that at certain angles of heel and trim, turns in place and in motion, a highly directional antenna can “lose” the Earth, and the Bort-Earth radio channel may be interrupted for a while. The antenna has its own drive, thanks to which its thin radio beam is directed to the Earth so that the signals received and emitted by it must always be maximum. The quality of commands executed by the moon research vehicle and the information received from it depends on this.
Uninterrupted radio communication with the moon research vehicle was provided by an operator for targeting a highly directional antenna. His duties included the issuance of radio commands to adjust the spatial position of the antenna in its strict direction to the Earth in accordance with the dynamics of the movement of the lunar rover. And, of course, there must be a commander who takes the reports of all four operators, carries out the general management of their work and takes the final decision at crucial moments. It was then that a new term appeared in the space program - “the crew of the moon rover”.
Here I want to emphasise that for the first time in world practice, the crew and the vehicle, as already noted above, divided the distance by almost 400 thousand kilometres. Of course, this required a completely new approach in considering the “man-machine” link, the embodiment of new forms of combining automation with the operator’s work of the ground control group. Equally important was the rational distribution of functions between the crew and the means of automation, between the commander, driver, operator of the highly directional antenna, the flight engineer and the navigator. Each member of the crew had enough work to do, which was confirmed by the very first training sessions with the technological model of the lunar rover.
It should be noted that engineering and psychological research, rational psychophysiological selection of operators, careful formation and consolidation of necessary skills, as well as operational control of the functional state of crew members during communication sessions with the moon research vehicle became an essential element in the overall set of measures to create a teleoperator control system. Without this, the overall reliability of the latter could not be maintained at the proper level.
And further. Before starting work, the operators underwent medical control, and in the process of driving, an express diagnosis of their emotional stress was made. Wearable special “bras” with sensors automatically recorded the heart rate, blood pressure, body temperature and other parameters.
The training program for drivers involved the development of their ability to determine the distances to objects (landmarks, stencils, stones, etc.) installed at the lunar-drome and presented to the video monitor. On personalised formal letterheads developed by L.N. Polyakov, the results were recorded and compared with actual data.
How the crew learned to drive the rover
The central place on the driver's remote control DU-001 is occupied by a television screen with a diagonal of 35 cm, on which, according to the rationalisation proposal of the drivers, a transparent film was applied. There was an image of two straight black colours emanating from the lower extreme points of the screen and converging in the centre on the horizon line of the lunar surface and space with zero heel and trim values. These lines showed where the wheels of the left and right sides of the Lunokhod would pass. The grid was created in two versions: for central and lateral course cameras. The same grids were used on the VCU of the crew commander’s console (DU-003).
Usually, the area looked good up to 8–9 meters, and then the details merged, and the situation was difficult to assess. Therefore, these straight lines were connected by horizontal lines with marks 2, 4, 6 and 8, corresponding to distances in meters from the Lunokhod site. This allowed the driver to quickly assess the situation in the direction of travel and make the right decision. To the left of the WCU, there were dial-up devices “Differente”, “Roll”, “Course” and “Path”, which informed the driver about the angles of ascent (descent) and inclinations of the moon rover, its direction of movement and the distance traveled.
The direction of motion of the moon rover was determined by the inclination of the handlebars, which had fifteen fixed positions: “Forward”, “2nd speed”, “Back”, “Left”, “Right”, “Stop”. "Turn 1" (5 °), and the other - "Turn 2" (20 °). "9 wheel", "Lower", "Raise", "Delay", "Soil Sample" Also on this panel were buttons for duplicating the issuance of commands in the Lunokhod's motion mode in case of a malfunction of the handle (handwheel). Each team issued by the driver was displayed on two light boards, one of which informed about the issuance of this particular team, and the other about its performance on board. Performance information (the so-called “receipt”) came to the pool room in 4.1 seconds. Comparing the image of the surface area displayed on the VKU with the readings of the instruments, the driver reported to the commander about the distances to the obstacles (stones, craters, crevices, etc.), their shape and size.
Under a special program, operators of a highly directional antenna were trained. After all, the quality of the image of the "lunar" surface on the television screen depended on the accuracy of their actions. The optimal position of the antenna was provided by issuing on board the moonwalker commands from the operator’s console a highly directional antenna (DU-002): “Rotate 7.5”, “Rotate 15”, “Rotate 180”, “Right”, “Left”, “Up”, “ Down and Stop.
A large training course was held by commanders, navigators and flight engineers. The commander’s console provided for the perception and processing of information coming from the moon rover. The commander, like the driver, had before him the instruments by which he estimated the position of the car by roll and pitch, the direction of its movement (course) and the distance traveled, and by means of the gearbox it recognised the obstacles and determined the distances to them. On this basis, he decided on the further actions of the driver. With the "Stop" button, the commander could at any time stop the movement of the moon rover.
A black-and-white photograph (“picture”) was displayed on the driver’s console, the operator of the highly directional antenna and the commander, which “hung” on the screen of the ICD by 3.2; 5.76; 10.88 or 21.12 seconds depending on the selected mode. If the device was moving, then during such a delay it could go a distance of 2.3 to 8.3 meters at first speed. Therefore, the driver was obliged to report to the commander (this report was also heard by all crew members) about obstacles on the track and to propose a decision on the choice of a further route.
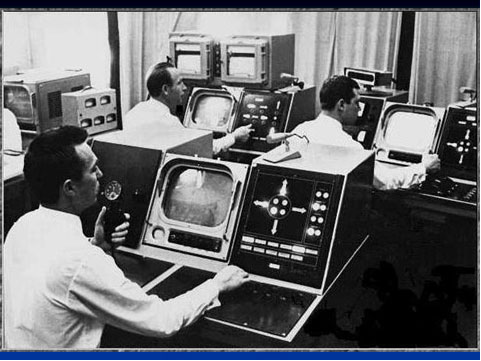
Пункт управления луноходом
Acquired management skills allowed drivers to quickly assess the situation in the sector at a distance of 3 - 9 meters and make a decision when there is a delay of more than 7 seconds. It was a strange way to control, because every time an image appeared on the UHC that did not look like the previous one. It was necessary to get used to this work well, in order to feel the movement of the Lunokhod from the inside. It is difficult to come up with something similar in terrestrial conditions, to understand how a driver feels in such a situation. Along the way, I will note that natural processes similar to lunar ones do not occur on earth.
Commanders and drivers learned to quickly assess the situation, make decisions based on television images, instrument readings on consoles, telemetry data and short, monosyllabic reports of the navigator and flight engineer. The periodicity, the rhythm of the reports of the commander (call sign "103"), the driver ("101"), the operator of the highly directional antenna ("102"), the flight engineer ("105") and the navigator ("104"), and the form of mutual attention to the most important parameters or unexpected situations. Particular attention was paid to the ability to assess the spatial characteristics, determine the distance to the obstacles and their size, shape on a flat image on television screens.
After acquiring solid skills in the teleoperator control of the Lunokhod, two crews (crews) were formed: commander I. Fedorov, drivers V. Dovgan, N. Ivanov and A. Kalinichenko, operator of the sharply directed antenna N. Kozlitin, navigator V. Samal, flight engineer A. Kozhevnikov; Commander Yu. Vasilyev, drivers N. Eremenko, G. Latypov and V. Sapranov, the operator of the sharply directed antenna V. Chubukin (he is also the backup driver of the lunar rover), navigator K. Davidovsky, flight engineer L. Mosenzov.
Huge plans
By the Decree of the Central Committee of the CPSU and the USSR Council of Ministers No. 19-10 of January 8, 1969, the following dates were established for the launches of lunar spacecraft: the objects of the E-8 project (lunar rover) were scheduled for February, October and November; Projects of project E-8-5 (fence and delivery of lunar soil to the Earth) - in April, May, June, August and September. The first launch of the Proton-K launch vehicle (PH) with a lunar rover was scheduled for February 19, 1969. The forces and means of the CEC that participated in the work reported on their full readiness. The start was at the appointed time.
Report from Baikonur: “10 seconds - normal flight” ... “20 seconds - normal flight” ... “30 seconds - normal flight” ... Then the messages were interrupted. It turned out that at 51.4 seconds of the flight the head fairing collapsed, its fragments crashed into the fuel tanks of the first stage and pierced them, which led to the explosion of the Proton-K launch vehicle and the complete destruction of the unique lunar rover. One can understand the feelings with which the participants in this failed experiment returned from their jobs. Especially it was the crew members and the control group. Moreover, according to the Directive of the General Staff of the Strategic Missile Forces No. 925035 dated January 28, 1969, the Laboratory 3 (lunar self-propelled vehicles) was introduced into the staff of the department 25 of the KHCF KIK Centre.
Thus, the creation of a “laboratory for remote control of automatic self-propelled devices such as a moon rover” was finally legally formalised. The reason for this was the Resolution of the Central Committee of the Central Council of Communicators and Ministers of the USSR No. 115-46 of February 4, 1967.
Once Sergey Korolev once said that “when creating space objects one should not take records. It is not known how to control the machine from the Earth ... Therefore, it is necessary to reduce driving parameters - speed and maximum mileage. It is necessary that the lunar rover pass over the moon at least ten kilometres and at a slow speed. ” In a word, you go quieter - you will continue, we do not need recklessly on the moon.
Before the landing of the "Luna-17" and the creation of the first track, the mobile scientific laboratory "Lunokhod-1" remained 626 Earth days. But this technical break for crew members did not pass without a trace. On the recommendation of G.N. Babakina, the crew members took direct part in the control and analysis groups of the Luna-15 (July 13 - July 21, 1969) and "Luna-16" expeditions (September 12 - September 21, 1970) intended for taking and delivering lunar soil to the Earth, most, increasing their knowledge in remote control of lunar spacecraft.
Crew training for the management of the Lunokhod resumed only in October 1969.
Moon mission
A year later, on November 10, 1970, the Proton-K launch vehicle was launched from Luna-17. November 17 at 06:46:50 the main task of delivering the Lunokhod-1 mobile scientific laboratory to the Moon was completed successfully. A day later, domestic and foreign media outlined the TASS report on the beginning of the lunar mission and the triumph of the Soviet space program. A few words about the heroes of the occasion.

Members of the State Commission with the crew of the lunar rover
They were two crew calculations, which were approved in advance by the State Commission. The composition of the first calculation included the commander, Major N.M. Eremenko, driver, senior lieutenant GG Latipov, operator SHE senior lieutenant V.M. Sapranov, major navigator K.K. Davidovsky, Flight Engineer Major L.Ya. Mosenzov, in the second - commander Major I.L. Fedorov, driver major VG Dovgan, the operator of a highly directional antenna, Major N.Ya. Kozlitin, navigator major V.G. Samal, flight engineer major A.E. Kozhevnikov.
Here it must be emphasised that during the work on the moon, the crews, due to the high voltage, replaced each other every two hours. And so nine - ten hours of everyday hard work.
For eleven lunar days, and each lasts 14.5 Earth days, Lunokhod-1 carried out the planned program. The total duration of its active existence was 301 days 06 hours 37 minutes. During this time, he traveled 10,540 meters, surveyed 80,000 square meters of the lunar surface. As a result, the radioisotope heat source has exhausted its resource and the Lunokhod has "frozen".
The successes of Lunokhod-1 inspired our leadership to implement the next Lunokhod-2 space program. And although the new project apparently was no different from its predecessor, but it was seriously modernised. January 16, 1973 "Luna-21" delivered it to a natural satellite of the Earth. However, a completely stupid story happened to him. By this time, "Lunokhod-2" was on the moon for four months and during this time managed to pass 42 kilometres and take hundreds of measurements and experiments. May 9, I sat at the helm. And then we landed in the crater, and the navigation system ordered to live long in flight. The question arose: how to get out of it? In passing, I note that we had to get into similar situations earlier. But then we just closed the solar panel and got out as we could. And then we received a command to exit the crater with the panel open. Like, if we close it, there will be no heat pumping from the instrument compartment, and the electronic equipment will overheat. We tried to get out of the crater and hooked the lunar soil. And the lunar dust turned out to be so sticky ... The Lunokhod stopped receiving recharging with solar energy in the required amount, which led to a decrease in battery charging. On May 11, the signals from him stopped altogether. They could not wake him up from Earth. It was sad, but not tragic: after all, Lunokhod-2 completed its mission.
Instead of conclusion
By the 40th anniversary of the end of the Lunokhod-1 mission, an important stage of the Soviet lunar program, on June 15, 2012 the International Astronomical Union (IAC) decided to name the craters along the Lunokhod-1 route in honour of its crew members. These craters are small, from 100 to 400 meters in diameter, and according to the rules of the IAS, personal names were chosen for them: “Albert” (Albert Kozhevnikov); Valera (Valery Mikhailovich Sapranov); “Vasya” (Chubukin, Vasily Ivanovich); Vitya (Samal Vikenty Grigoryevich); “Gene” (Latypov Gabdulkhay Gimadutinovich); “Igor” (Igor Fedorov); “Kolya” (Kozlitin Nikolai Yakovlevich); “Kostya” (Davidovsky Konstantin Konstantinovich); Leonid (Leonid Yakovlevich Mosenzov); "Nicolas" (Eremenko Nikolai Mikhailovich) and "Slava" - your humble servant.
The creation of Lunokhod-1 and Lunokhod-2 was firmly established in the world history of the development of space science and technology. Having accomplished a great deal of scientific work, the world's first remote-controlled vehicles remained on the Moon as monuments to the triumph of the Soviet cosmonautics.
P.S. I would like to thank Pavel Palchikov for help in preparing this material for printing.






